Chuer PanHey there! I am a PhD student at Stanford University working in robotics, advised by Prof. Shuran Song. I am a member of Robotics and Embodied AI Lab @ Stanford. 🌊 This summer, I am interning at Boston Dynamics, working on perception for Atlas manipulation!
I obtained my MS in Robotics from CMU Robotics Institute. I worked with David Held on object-centric 3D representations for precise manipulation.
I earned my BASc in Engineering Science, majoring in Robotics from the University of Toronto. There I worked on NLP with Frank Rudzicz at the Vector Institute. Earlier, I conducted research with Eugenia Kumacheva on fabricating human micro blood vessels :)
I also worked on FPGA software at Altera (then acquired by Intel), motion planning for autonomous vehicle at aUToronto. I also co-founded a machine learning student club (UTMIST).
Email: chuerpan at stanford dot edu |
|
ResearchI develop robotic systems that learn high-precision, contact-rich manipulation from human demonstrations and generalize to novel visual and behavioral settings with minimal adaptation. My research combines 3D scene representations and motion planning with imitation learning for efficient skill transfer from few examples. |

|
Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild RobotCheng Chi*, Zhenjia Xu*, Chuer Pan, Eric Cousineau, Ben Burchfiel, Siyuan Feng, Russ Tedrake, Shuran Song Robotics: Science and Systems (RSS), 2024 ★ Best Systems Paper Award Finalist, RSS 2024 ★ paper / website / We propose a portable data collection and policy learning framework that allows direct skill transfer from in-the-wild human demonstrations to deployable robot policies, allowing zero-shot generalizable dynamic, bimanual, precise, and long-horizon robot policies. |
|
Open X-Embodiment: Robotic Learning Datasets and RT-X ModelsOpen X-Embodiment Collaboration International Conference on Robotics and Automation (ICRA), 2024 ★ Best Conference Paper Award, ICRA 2024 ★ paper / website / We introduce the largest robot learning dataset to date with 1M+ real robot trajectories, spanning 22 robot embodiments. We train large, transformer-based policies on the dataset and show that co-training with our diverse dataset substantially improves performance. |
|
TAX-Pose: Task-Specific Cross-Pose Estimation for Robot ManipulationChuer Pan*, Brian Okorn*, Harry Zhang*, Ben Eisner*, David Held Conference on Robot Learning (CoRL), 2022 paper / website / We propose a vision-based system that learns to estimate the task specific pose relationship (cross-pose) between pairs of interacting object using learned cross-object correspondences. We demonstrate that our method is able to learn from just 10 real point cloud demonstration with no pose annotations needed and generalize to novel instances within the trained object category. |
|
Deep Projective Rotation Estimation through Relative SupervisionBrian Okorn*, Chuer Pan*, Martial Herbert, David Held Conference on Robot Learning (CoRL), 2022 paper / website / We propose a new algorithm for self-supervised orientation estimation which utilizes Modified Rodrigues Parameters to stereographically project the closed manifold of SO(3) to the open manifold of 3D Euclidean space, which avoids the local optima common when naively applying relative self-supervision for object orientation estimation, allowing for faster convergence and lower rotational error on relative rotation estimation. |
|
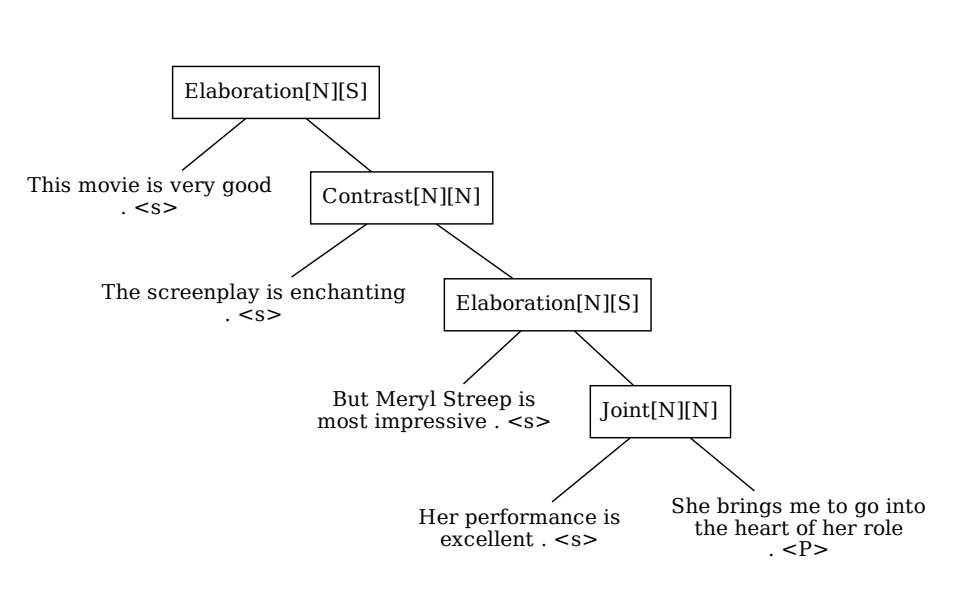
Examining the rhetorical capacities of neural language modelsZining Zhu, Chuer Pan, Mohamed Abdalla, Frank Rudzicz Conference on Empirical Methods in Natural Language Processing (EMNLP) BlackboxNLP Workshop, 2020 paper / video / We propose a method that quantitatively evaluates the rhetorical capacities of neural language models (LMs) by evaluating their abilities to encode a set of linguistic features derived from Rhetorical Structure Theory (RST). Our experiments show that BERT-based LMs outperform other Transformer LMs such as GPT-2 and XLNet, revealing richer discourse knowledge in their intermediate layer representations. |
|
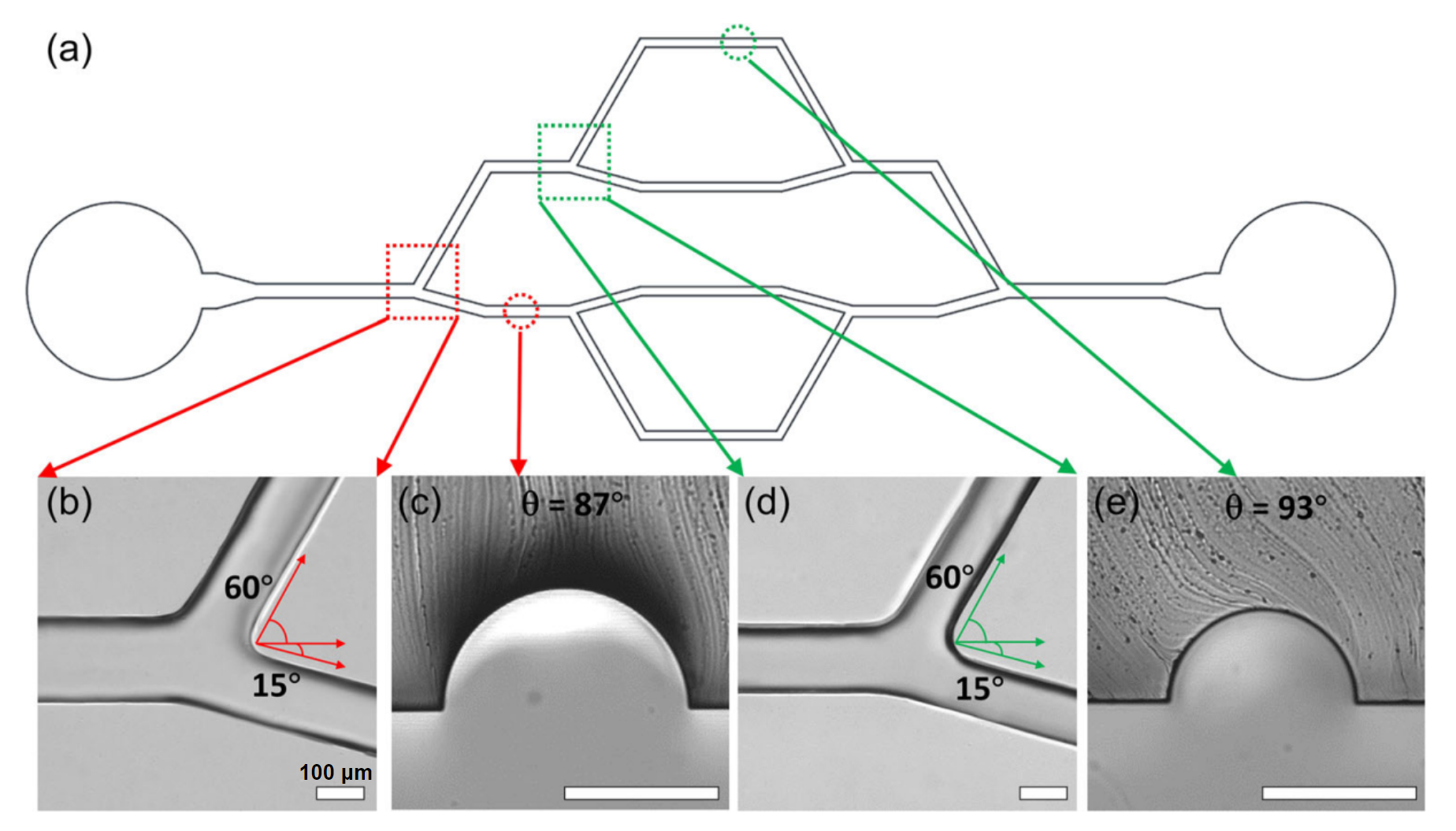
An exploration of the reflow technique for the fabrication of an in vitro microvascular system to study occlusive clotsYang Li, Chuer Pan, Yunfeng Li, Eugenia Kumacheva, Arun Ramachandran Biomedical Microdevices, 19(4), 1-16, 2017 paper / We introduce a reflow technique for fabrication of multi-level microchannel network with circular cross-section to systematically study the dissolution effects of thrombolytic drug on occlusive embolic clots in microvascular system. |
|
Design and source code from Jon Barron's website |